

嫦娥五号重访月球的喜讯不断。月面软着陆、自动采样、起飞上升、无人交会对接等一系列艰难任务均已顺利完成。携带月岩和月壤的返回舱已进入月地转移轨道,即将返回地球家园了(图1)。国人无不欢欣鼓舞,探月工程再次成为关注的对象。与探月过程密切相关的力学问题也引起公众的兴趣。
探月工程的设计需要了解太空中的三个物体:地球、月球和飞船在相互引力场影响下的运动规律。在天体力学中,三个物体在万有引力相互作用下的运动称为三体问题。与二体问题不同,三体问题因微分方程不存在解析积分,很难归纳出普遍性规律。但就探月工程的具体问题而言,由于飞船的质量远远小于地球和月球,它对月球和地球运动的影响可以忽略不计。地球与月球在相互万有引力场中的运动规律已由二体问题完全确定,因此只需要研究飞船在地球和月球引力作用下的运动。这类简化的三体问题称为限制性三体问题。
图1 嫦娥五号(引自《人民日报》)
一、地月坐标系
**讨论地球和月球构成的地月系统的运动规律。以地月连线为坐标轴,月球绕地球的轨道面为坐标面建立参考坐标系。为便于讨论,称之为“地月坐标系”。将地月系统视为封闭系统,忽略太阳引力产生的公转运动,系统的总质心O 视为太空中的固定点。以下标 1, 2 作为地球和月球的标识,设地球的质心O1和月球的质心O2的距离为a。O点在O1与O2的的连线上,与O1和O2的距离a1和a2 分别与质量m1和m2成反比,满足
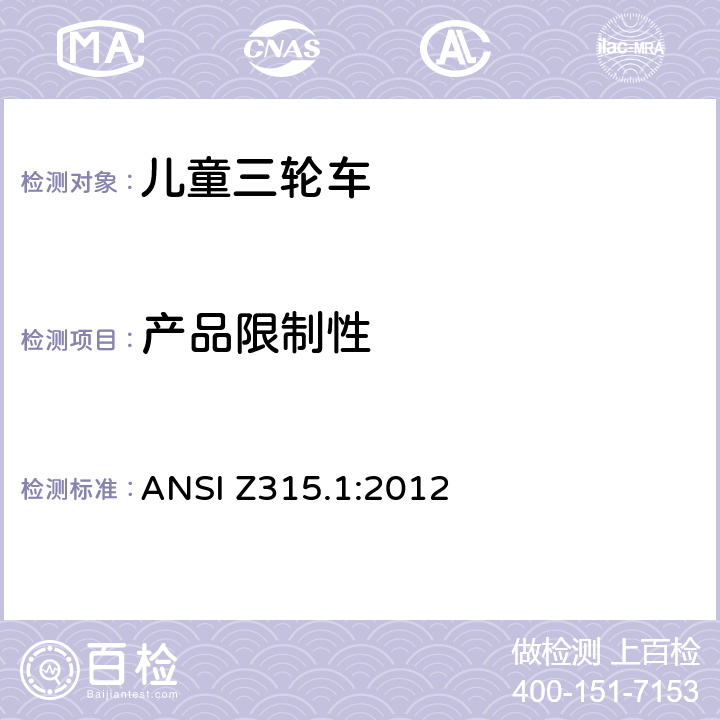
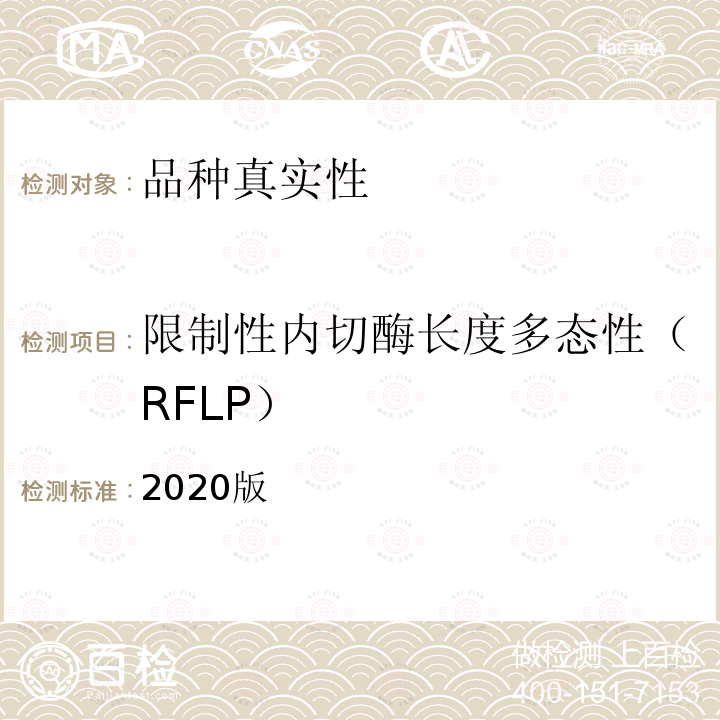
其中地月距离a = 3.844×105km。将m1= 5.976×1024kg, m2= 7.35×1022kg代入,算出a1= 4700 km,a2= 3.797×105km。a1小于地球的半径 6371 km,表明系统的总质心O在地球的范围以内,与地球的质心O1接近。地球和月球在相互引力作用下,绕O点作偏心率为e= 0.0549 的开普勒运动,可足够准确地视为圆轨道运动。O1与O2的连线连同地月坐标系,绕O点以角速度ωc匀速转动。图 2 中表示的三个圆轨道由小到大,分别为地球和月球绕总质心O的轨道,以及月球相对地球绕地心O1的轨道。地球和月球的相互引力F= Gm1m2/a2与距离a的平方成反比,G为万有引力常数[1]。此引力分别作用于地球和月球,与各自的离心惯性力平衡:
定义μ1=Gm1,μ2=Gm2为地球和月球的引力参数,从上式解出地球和月球的圆轨道角速度ωc
其中μ=μ1+μ2为地月系统的引力参数。将G= 6.67×10-11m3/kg˖s2代入计算,得到μ1= 3.986×105 kg3/s2, μ2= 4.903×103 kg3/s2, μ= 4.035×105kg3/s2, ωc= 2.66×10-6 s-1,周期T= 1/ωc= 0.376×106 s。绕行一圈的时间,即月球绕地球的公转周期为27.3天。
图2 地球和月球的轨道
任何平衡状态必须是稳定的平衡才是可实现的状态。以月球在地球引力和离心惯性力作用下的平衡为例。地月引力m2μ1/a2与O1点的距离a的平方成反比,离心惯性力m2a2ωc2与O点的距离a2成正比。如有微小扰动使月球向地球方向稍稍靠近,则a和a2均减小,导致引力增大,离心力减小。月球在扰动力推动下就会向地球接近,*终掉落在地球上。如扰动方向相反,则a和a2增大使地球引力减小,离心力增大。月球就会愈飞愈远。可见仅考虑地球引力与离心惯性力,所维持的平衡是不稳定平衡。此结论不能解释月球已稳定陪伴地球 40 亿年的事实而明显错误。
错误的根源在于,除地球引力与离心惯性力以外,还有一个重要因素被忽略了,那就是科氏惯性力。当月球因扰动产生趋向地球的相对速度v时,会因地月坐标系的牵连角速度ωc产生科氏惯性力Fc =-2m2ωc×v 。指向与ωc和v均正交的侧方,使月球受扰后朝与扰动正交的方向运动,转变为绕平衡位置O2的微辐圆周运动(图3)。依据博文 “运动员的旋空翻与欧拉-潘索运动” 中的说明,O2处的平衡状态为 “中心” 类型的稳定奇点。证明月球在地月坐标系内的平衡为稳定平衡。地球与月球共同形成地月坐标系的稳定构架。较严格的分析可参阅附录中列出的稳定性证明。
附带指出,除地月引力为保守力以外,离心惯性力也有势函数存在,也可视为保守力。一般情况下,保守系统的稳定性可利用拉格朗日定理以*小势能条件做出判断,但不适用于有离心惯性力参与的保守系统。原因是转动坐标系中的受扰运动出现科氏惯性力,而不做功的科氏惯性力不影响系统的势能,因此不同于一般的保守系统[1]。
通过以上分析可以看出,判断任何物体在转动坐标系内的平衡稳定性时,科氏惯性力是不可忽略的因素,有时甚至能对稳定性起决定性作用。
图3 月球的受扰运动
二、 拉格朗日点
在飞船的登月运动过程中,地球和月球都在太空中不停地运动。要对一个运动的目标计算飞船的轨道,难度*大。前面已证明地球和月球相对平衡的稳定性,它们在所组成的地月坐标系中均为固定点。因此在地月坐标系中规划登月路径,上述难题即迎刃而解。
以O点为原点,O1与O2的连线为x轴,轨道平面的法线为z轴,建立地月坐标系 (O-xyz),是绕O点以角速度ωc匀速转动的非惯性坐标系。设质量为m的飞船P相对O点的矢径为r,相对O1和O2点的矢径为ρ1和ρ2(图4)。各矢量在轨道平面 (O-xy) 中的投影为
图4 飞船在地月系统中的坐标
飞船在地月坐标系内受地球引力F1、月球引力F2和离心惯性力Fc的作用。
在 (O-xy) 坐标平面内存在一些特殊点,飞船在此特殊点处,引力和离心惯性力满足平衡条件:
而处于平衡状态。将式 (5) 代入式 (6) ,投影到x轴和y轴,消去公因子m,得到
拉格朗日点由方程组 (7a),(7b) 的特解确定,以增加的下标 s 表示。先从方程 (7b) 解出
特解 (8a) 确定的拉格朗日点必分布在x轴上。令式 (7a) 中ys= 0,则ρ1和ρ2沿x轴,其投影分别为x+a1 和 x-a2。在x轴上由O1和O2划分的 3 个区间 (-a1, a2), (a2, +∞), (-∞, -a1) 内,方程 (7a) 各有一实根xs存在,依序记作L1, L2, L3。
将另一组特解 (8b) 乘以xs,式 (7a) 各变量增加下标 s,令此二式相减,得到
利用式 (3) 可证明μ1a1=μ2a2,代入上式,得到ρ1s=ρ2s。代回式 (8b),且利用式 (3) 导出
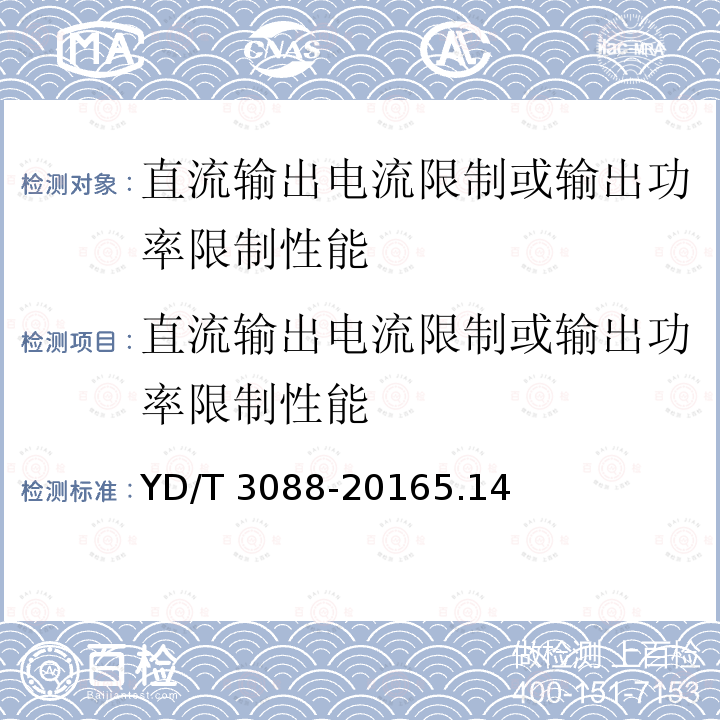
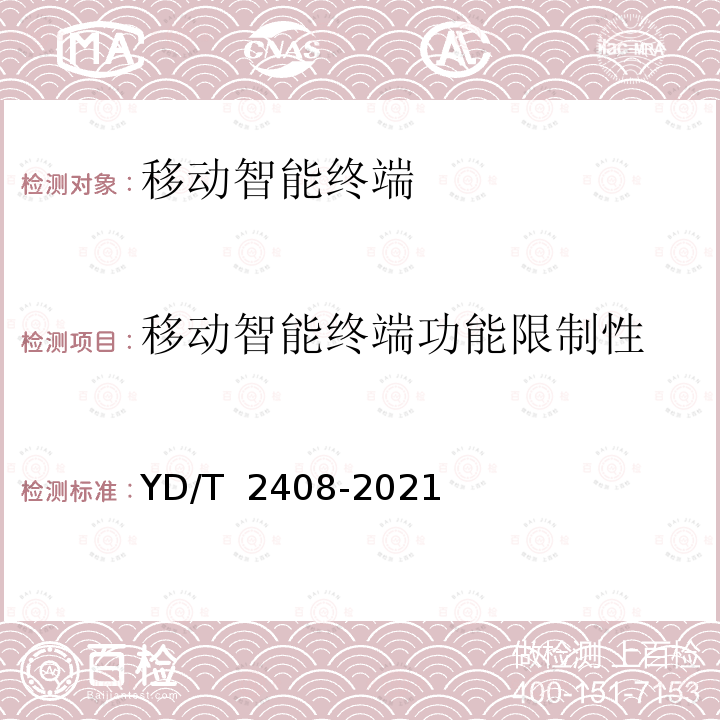
从而证明另两个平衡位置L4, L5与地球O1和月球O2构成边长为a的等边三角形(图5)。1767 年欧拉(Euler,L)**导出平衡位置L1, L2, L3,1772 年拉格朗日(Lagrange,JL)导出L4, L5。5 个可能平衡位置Li(i=1,2,˖˖˖,5) 统称为地月系统中的拉格朗日点(Lagrangian points),也称为平动点(Libration points)(图5)。各个拉格朗日点的具体位置在表1中列出。
图5 拉格朗日点
表1
以上关于拉格朗日点的分析和结论具有普遍性。任意两个大天体的引力场内均有 5 个拉格朗日点存在,在此特殊位置上这两个天体对物体的引力均与离心惯性力保持平衡。任何物体在此位置上均可能与两个天体保持相对位置不变。换言之,此位置上的物体在惯性空间内以相同的周期同时绕两个天体旋转。1906 年天文学家观测到木星公转轨道上超前 600位置有小行星与木星同步运行。之后在落后 600处也发现了类似情况,恰好与木星-太阳引力场的拉格朗日点L4和L5重合,称为脱罗央小行星群 (Trojan asteroids)。这**文发现验证了经典力学理论的正确性。
在探月工程中,拉格朗日点是飞船同时绕地球和月球转动的特殊位置。月球的自转周期为27.3 昼夜,恰好等于绕地球公转一周的一个恒星月。这种同步转动现象是潮汐长期作用的结果。因此月球在 (O-xyz) 动坐标系中不仅质心位置不变,而且姿态也固定不变。即永远以正面朝向地球和L1点,以背面朝向L2点。嫦娥四号已成功实现人类首次在月球的背面着陆。与L1点*适合对月球正面的观测和着陆类似,L2点就是背面着陆的*佳母船停泊点。
在地球-太阳引力场的拉格朗日点中,面对太阳的L1点是观测太阳的*佳位置,背对太阳的L2点是安放天文望远镜的*佳位置。L2也是远离地球实现深空探测的起点。2011 年 8 月 25 日,“嫦娥二号” 已从月球轨道出发,经过 77 天的飞行曾准确进入距地球 150 万公里的地日系统的L2点,开始了探测宇宙深处的试验飞行。
三、希尔曲线族
拉格朗日点也必须判断其平衡状态的稳定性。基于线性化扰动方程,考虑科氏惯性力因素,可以证明地月系统的拉格朗日点L1, L2, L3均为不稳定平衡,L4, L5为稳定平衡[1]。
拉格朗日点的稳定性还可通过对物体在地月系统中的全局运动规律来判断。由地月引力和离心惯性力组成的保守系统存在雅可比积分[1]
其中E为单位质量物体的机械能,V(x,y) 为物体在地月引力场和离心惯性力场中的势能函数
初积分 (11) 的物理意义为系统的总机械能守恒。因势能V为负值,当物体的初速度较低时,总机械能E亦为负值。将E写作 -│E│,从式 (11), (12) 解出
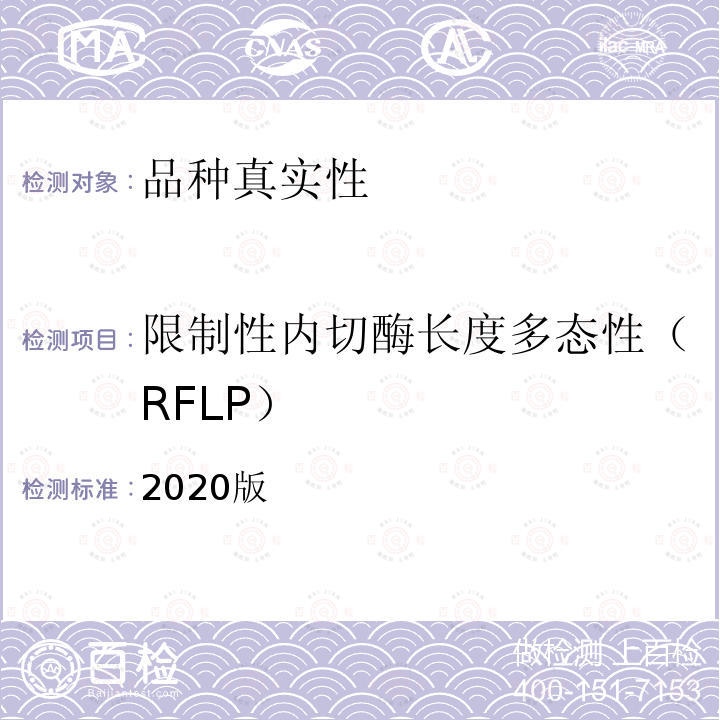
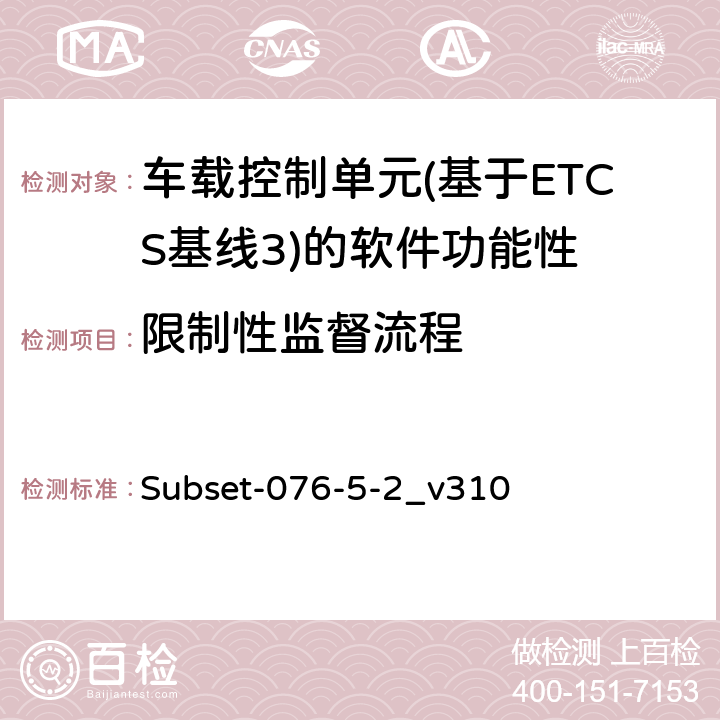
初始能量│E│确定以后,为保证v2为正值,物体只能限制在确定范围内运动。此运动范围的边界与零速度相对应。令式 (13) 中v= 0,得到以 │E│ 为参数的零速度曲线族,也称为希尔曲线(Hill,GW)(图6)。在拉格朗日点处,如物体的初速度为零必留在原地保持平衡。因此拉格朗日点Li(i= 1,2,˖˖˖,5)就是希尔曲线族中缩成奇点的特殊零速度线。
图6 希尔曲线族
物体的初速度不为零但较低时,希尔曲线为围绕O1或O2的封闭曲线。物体的运动被限制在地球或月球附近的空间内互不连通。增大初速度,则动能增大,│E│减小,零速度曲线包围的空间逐渐扩大。当围绕O1或O2的局部区域扩大到在拉格朗日点L1处互相接触时即形成通道,地月之间的联系方可能实现。所对应的初速度为通往月球的初速度*小值。初速度继续增大可使通道不断加宽,还可使飞船的可达空间在L3处乃至L4处相接,构成不同拉格朗日点之间的通道。当初速度增大到使E ≥ 0 时,物体的运动空间即不受限制。
根据拉格朗日点附近希尔曲线族的几何特征,可以直观地判断拉格朗日点的稳定性。从图 6 看出,L4, L5附近的零速度线为围绕拉格朗日点的封闭曲线族,物体在此位置的受扰运动保持在平衡位置附近。表明L4, L5为稳定平衡。而L1, L2, L3附近的零速度线具有鞍点特征,为不稳定平衡。不过即使是不稳定平衡,借助飞船上维持定位的自动控制系统,也能使飞船的平衡位置转为稳定,不影响探月工程的使用。
参考文献
1. 刘延柱. 高等动力学. 北京:高等教育出版社, 2001
(改写自:刘延柱. 月球轨道稳定性与科氏惯性力,力学与实践,2015, 37(4): 523-524
刘延柱. 关于地月系统的拉格朗日点,力学与实践,2015, 37(6): 765-768)
附录:地月系统的稳定性证明
图7 月球受扰前后的位置
 1stIEEE 802.1AB-2009 局域网和城域网.站点和媒体访问控制互连性探索
1stIEEE 802.1AB-2009 局域网和城域网.站点和媒体访问控制互连性探索 



 400-101-7153
400-101-7153 15201733840
15201733840

