

汽车异响中通常遇到的摩擦异响种类如squeak,creak,click,还有ting noise等都是由于两个相互接触的部件之间发生黏滑运动而产生。其实用一个简单单自由度弹簧-滑块模型可以宏观的解释它的力学特性。
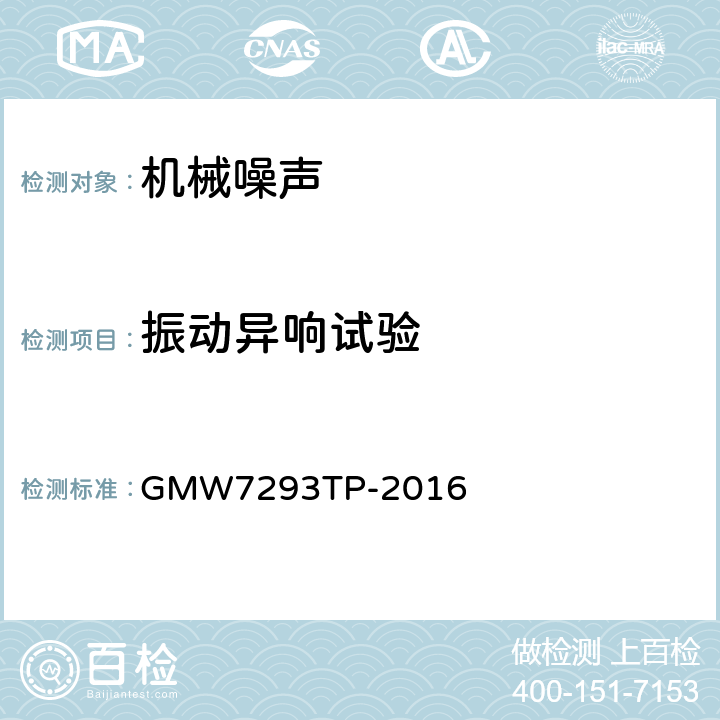
由以上模型不难发现,当我们试图用作用在两个摩擦表面之间的摩擦力F来模拟两个摩擦表面之间的黏滑摩擦时,会很快发现黏滑现象不仅取决于F,而且还取决于系统的其他参数,如运动部件的惯量、刚度(K)和质量(M)。考虑到摩擦表面本身的特性,黏滑的一个充分条件是静摩擦力fs(启动滑动所需的力)大于动摩擦力fk(滑动过程中的力)。其实从下图的接触面之间的相对位移与摩擦力的二维图中也可以一目了然地看出从粘滞到滑动过程中的能量转变情况。
图片来源:MOHSEN BAYANI,Squeak and Rattle Prediction forRobust Product Development
**是在粘滞(Sticking phase)状态下储存弹性应变能,当静摩擦力系数超过动摩擦系数时弹性应变能转化为动能,然后在滑动(Slipping phase)状态释放动能,从而产生异响(Squeak/squeal/creak)。
inkMacSystemFont, "">黏滑运动在不同的材料、接触条件和接触形式下的特性是不相同的。从材料接触面微观和介观的角度来分析分有以下三类:
inkMacSystemFont, "">
(a)粗糙表面黏滑模型(Topography)
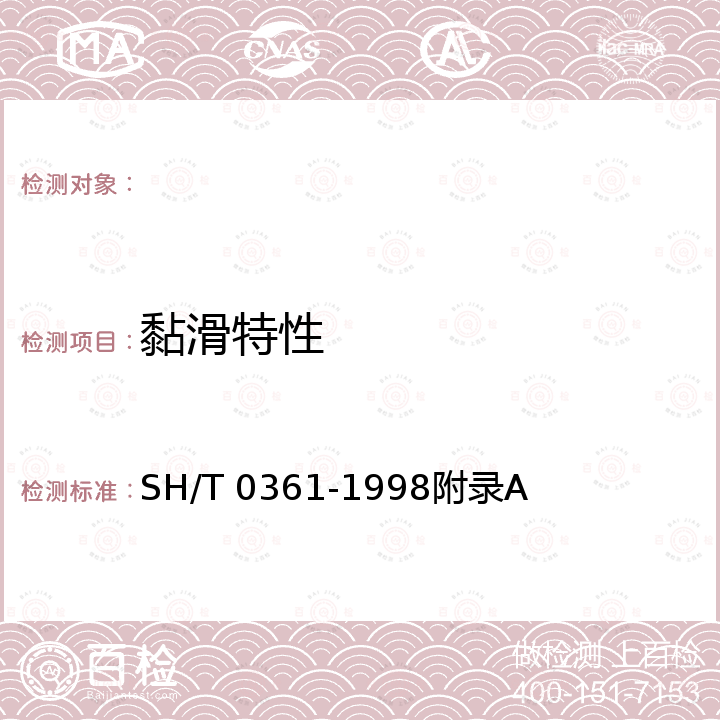
inkMacSystemFont, "font-size:15px;">该模型描述了当其中一个接触面在相互接触的表面上,由于滑动前的互锁而“粘滞”一段时间后再滑过另一个接触表面上的微凸体顶部时发生快速滑动的情况,此类黏滑现象主要是取决于接触面的粗糙属性,也是我们平时*熟悉的一类。
图片来源:Hisae Yosbizawa and Jacob Israelachvili
inkMacSystemFont, "font-size:15px;">从微观表面角度分析,接触面之间的接触形式如上图所示。粗糙峰的高度、坡度、驱动速度和接触面的材料特性等因素决定了界面运动中黏滞和滑动的状态。
举一个我们*熟悉的例子,如仪表上相互接触的材料之间在扭转或颠簸振动的工况下材料之间相互摩擦产生的squeak摩擦异响,其微观的黏滑摩擦运动形式就如以上模型所描述的那样。
粗糙表面黏滑模型认为,黏滑运动的滑动长度和频率决定于表面粗糙度和材料的机械性能,并未考虑相对运动速度、表面间黏附力等因素对黏滑现象的影响。
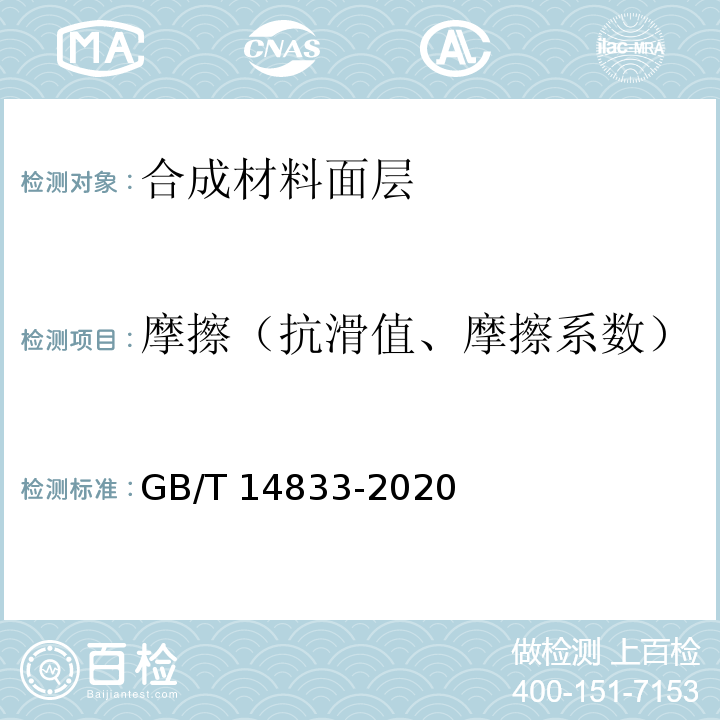
inkMacSystemFont, "font-size:15px;">如果再深究一些inkMacSystemFont, "font-size:15px;">,高分子非金属材料之间的摩擦接触面之间由于黏滑运动产生squeak noise其频谱特征如下所示:
inkMacSystemFont, "font-size:15px;">
inkMacSystemFont, "font-size:15px;">我们可以看到,摩擦异响Squeak在频谱图上具有变频成分,其实与squeal相比通常发生在相对较低的频带上,与creak相比又具有较少的脉冲特性。当然这类模型产生的摩擦异响不止在非金属接触面,在金属接触面之间也是经常可见的。比如电动汽车的底盘铝镁合金部件的连接表面,只不过这时候产生的异响类型如click,在这就不进一步展开解释,接下来我们看第二类黏滑模型。
(b)特征距离黏滑模型(Distance-dependent)
inkMacSystemFont, "font-size:15px;">这类模型描述的是当两个表面接触后随着附着强度的增加,在微观特征距离和时间尺度的变化关系。在剪切过程中,表面在滑动发生之前蠕变特征距离。从以下5副示意图我们可以观察到,当相互接触的两个表面在发生相对运动是,滑块上的微凸体(asperity)缓慢的爬行过特征距离Dc,然后再滑动分离。
inkMacSystemFont, "font-size:15px;">
inkMacSystemFont, "font-size:15px;">这类模型是由麻省理工学院的ErnestinkMacSystemFont, "font-size:15px;">Rabinowicz教授于1965提出来的,所以也叫Rabinowicz模型。这类模型下产的异响类型有我们*熟悉的如密封条与车身之间的,可以通过密封条台架试验测试出这个蠕动的特征距离:
inkMacSystemFont, "font-size:15px;">密封条在在蠕动过程中到达*大静摩擦力处对应的位移作为密封条结构设计的特征距离,控制该参数是控制密封条异响的一个重要因素,可以用台架测试的方法获得该参数。测试的结果如下图所示:
从这个测试数据我们就可以清晰地知道这个距离是多少,我们把这个特征距离也叫做密封条的*小异响位移。同时,还可以结合CAE计算结果与试验测试结果对比,分析密封条发生异响的风险,从而在设计前期可以进行优化。
(c)速度相关的黏滑模型(Velocity-dependent)-相变模型(Phase transition)
该模型描述的是在边界润滑的条件下发生的黏滑现象,当滑动开始后,界面间的微凸体或润滑膜处于熔化的状态,接触界面处的*大静摩擦力大于滑动摩擦力的状态,而黏滑运动可以视为接触面之间“固化一熔化”的循环。
这类黏滑模型与前两类模型的一个根本的区别在于,(a)和(b)都是在干摩擦条件下产生黏滑运动,而速度相关的黏滑模型是在润滑状态下发生的。这时你可能会问,怎么润滑条件下也会产生异响呢?从下面一个案例中我们就可以了解到黏滑运动确实在润滑状态下也会发生,而且会产生异响。如驱动轴端面与轴承表面接触区域:
由于轴的旋转,润滑剂被“拖入”接触区,从而减少表面间的相互作用,导致摩擦力下降。随着速度的增加,接触区中的润滑膜也增加,摩擦力进一步下降。当接触表面被润滑剂完全分离时,摩擦力降至*低。如果速度继续增加超过这一点,摩擦力就会随着润滑油膜的增加而再次增加,并产生粘性阻力。在这样反复的运动过程中接触表面就会产生周期性的粘滞和滑动,从而产生类似ting noise这类的异响。
以上三种黏滑摩擦模型从不同的角度对微观的黏滑现象进行解释,也给我们提供了解决类似异响的思路,而不是采用“一招鲜”的办法解决所有的黏滑摩擦异响问题。
关于汽车领域的相关的专业知识就为大家介绍到这里了,更多相关的行业知识可以关注我们。百检网是一个大型的综合性知识分享型平台,持续为您分享各类行业知识。做检测 上百检!百检网只做真实检测。 1stNF T51-110-1975 用平面与平面摩擦的方法进行磨损试验(交替线性滑动摩擦法)
1stNF T51-110-1975 用平面与平面摩擦的方法进行磨损试验(交替线性滑动摩擦法) 




 400-101-7153
400-101-7153 15201733840
15201733840

